Ask a question
Electronics
- I have a load limiter composed of a load cell and a BRIDGE-BOY. When there is no load on hoisting device, the BRIDGE-BOY triggers unexpectedly.
- How to change the sensitivity range of the bridge-boy ?
- What is the accuracy of the INDI-PAXS ?
- Is it allowed to connect multiple sensors in parallel to the same overload protection electronics?
- How to tare a DIS P-Fx-yz display using an external contact.
- What is the accuracy of an overload protection system for EOT crane using load pins.
- Configuration of the RS232 output of INDI-5250 or INDI-00
- How to define different trigger thresholds from a button on our digital load limiters ?
- Configuration of the pax family products in order to recover the value displayed on my PC or my PLC.
- How to apply a calibration resistor (Rcal) on a sensor already delivered ?
- What is the measurement and refresh rate of a display of the PAX series and its analog output (CARD-CDL10) ?
Que faire si un BRIDGE-BOY se déclenche de manière intempestive lorsque le levage est à vide?
[answer] =>Description
Je possède un limiteur de charge composé d’un capteur de force et d’un BRIDGE-BOY.
Lorsque le levage est à vide, le BRIDGE-BOY se déclenche de manière intempestive.
Réponse
Pour garantir la sécurité positive, le BRIDGE-BOY se met en défaut lorsque le signal de sortie devient inférieur à - 0,5 V.
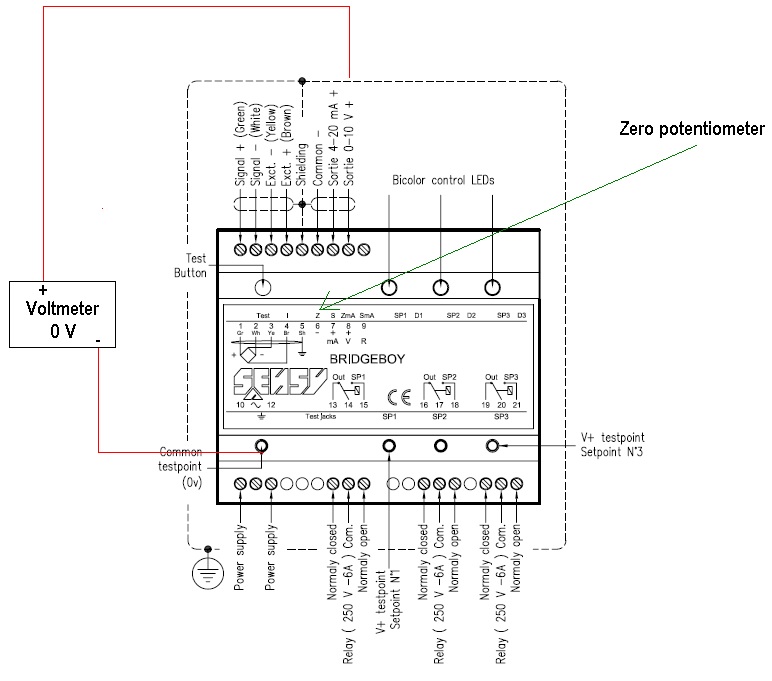
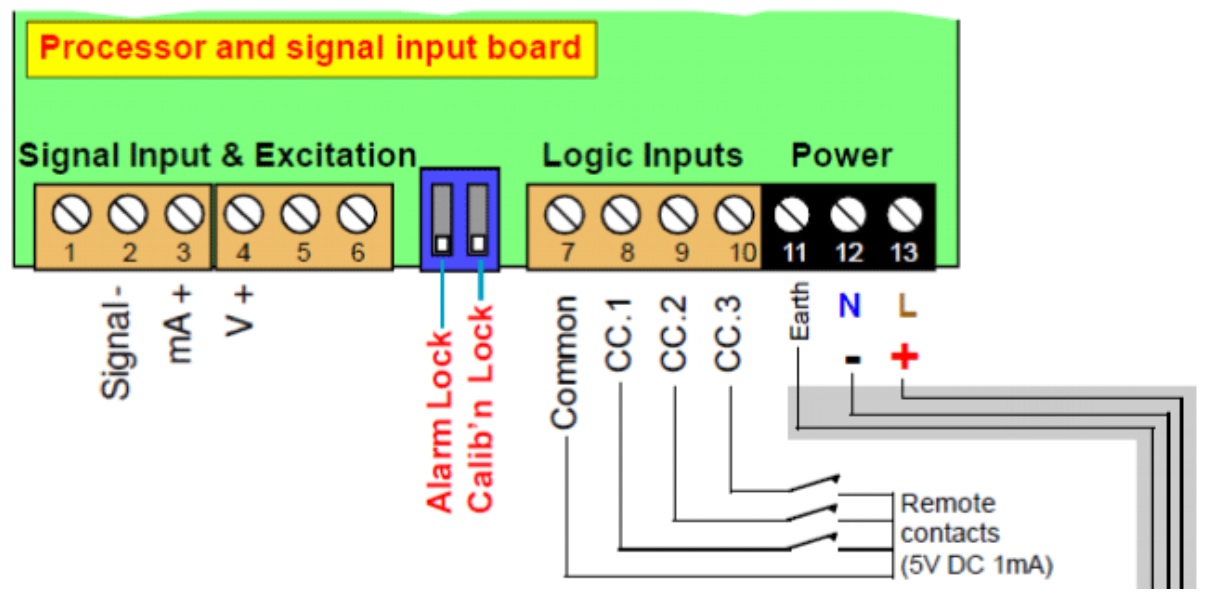
Mettre le levage à vide. Mesurer la tension entre la borne 8 (+) et la masse (-) (voir le dessin ci-dessus).
Ce signal ne peut pas être négatif. Si nécessaire, augmentez-le jusqu’à 0 V ou une valeur légèrement positive (ex. : 0,1 V) en utilisant le potentiomètre du zéro (Z).
[meta_title] => FAQ - BRIDGE BOY - Déclenchements intempestifs lors du levage à vide [meta_description] => Dans ce FAQ, nous vous expliquons pourquoi le Bridge Boy peut se déclencher de manière intempestive lors d'un levage à vide. [meta_keywords] => Limiteur de charge, Limitation de charge, Mesure de levage, Capteur de levage [tags] => Limiteur de charge,Limitation de charge,Mesure de Levage,Capteur de levage [link_rewrite] => limiteur-de-charge-compose-dun-capteur-de-force-et-dun-bridge-boy-se-declenche-de-maniere-intempestive [link_rewrite_cat] => electroniques )[1] => Array ( [id_gomakoil_faq] => 5 [id_gomakoil_faq_category] => 1 [link_rewrite_no] => [most] => 0 [association] => 0 [hide_faq] => 0 [name] => Admin [email] => no [by_customer] => 0 [position] => 4 [active] => 1 [date_add] => 2019-05-21 05:49:32 [as_url] => 0 [id_lang] => 1 [id_shop] => 1 [question] =>Comment changer la plage de sensibilité du BRIDGE-BOY?
[answer] =>Description
Je ne parviens pas à obtenir le signal de sortie demandé à l'aide du potentiomètre S.
Comment changer la plage de sensibilité du BRIDGE-BOY?
Réponse
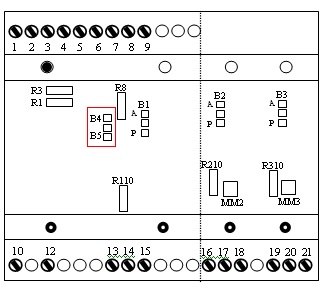
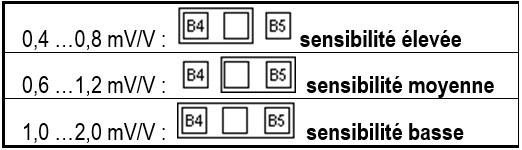
En modifiant le pont de soudure B4-B5 (voir encadré en rouge) suivant le tableau en bas de page.
Quelle est la précision de l’INDI-PAXS?
[answer] =>Réponse :
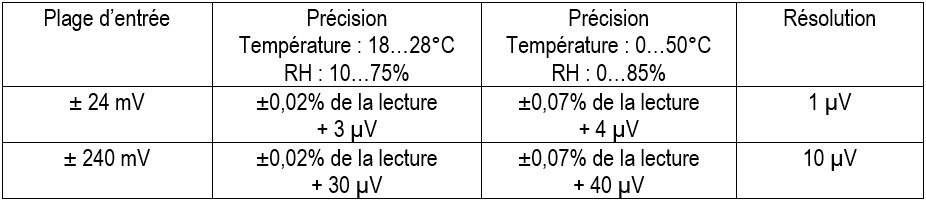
La classe de précision de l’INDI-PAXS annoncée par SENSY est de ± 0,1 % de la pleine échelle. En fait cette valeur peut être définie plus finement:
Exemple:
La précision de l’INDI-PAXS si connecté à un capteur fournissant un signal de 2 mV/V, utilisé entre 18 et 28 °C (humidité relative entre 10 et 75%) et alimenté en 10 V, la précision sera meilleure que : ±0,02% ±(3/20.000) = ±0,035% de la pleine échelle.
Par contre, dans une plage de température de 0 à 50°C (humidité relative de 0 à 85%), celle-ci devient : ±0,07% ± (4/20.000) = ±0,09% de la pleine échelle. Dans ces cas la résolution maximale est de 1/20.000 = 0,005% de la pleine échelle.
Remarques:
- Ces valeurs ne sont valables qu’après une période de préchauffage de 20
mn. - Pour la plage de température de 0 à 50°C, les dérives thermiques sont incluses dans les précisions annoncées.
- La cadence maximale de rafraîchissement de l’affichage (dSP-t) est de 10/sec. afin de permettre la compensation interne de zéro.
De plus:
- La précision de la tension d’alimentation du capteur (5 ou 10 VDC) est de ± 2%. Sa dérive thermique maximale (ratio metric) est de 20 ppm/°C.
- La précision de la sortie analogique (Option CARD-CDL10) est de ±0,17% de la pleine échelle dans la plage de 18 à 28°C ; et de ±0,4 % de la pleine échelle dans la plage de 0 à 50°C.
Peut-on brancher plusieurs capteurs en parallèle sur la même électronique de limitation de charge ?
[answer] =>Remarque:
C’est une pratique courante dans le domaine du pesage (signaux non amplifiés en mV/V).
Réponse:
Non, car la sécurité positive n’est alors plus garantie.
En effet, au cas où un capteur de force (ou axe dynamométrique) se débrancherait, l’électronique (BRIDGE-BOY, CRANE-BOY ou INDI-BOY) ne pourrait pas détecter cette défaillance dans tous les cas de figure.
Les solutions sont:
- Réaliser la connexion en parallèle à l’aide d’une boîte de jonction intelligente JBOX-LCI.En effet la JBOX-LCI réalise aussi et ce en continu le contrôle du bon fonctionnement de chaque capteur.
Remarques:
• Le nombre de capteurs est limité à 4.
• La JBOX-LCI est alimentée par l’électronique de limitation.
• Elle est compatible avec les CRANE-BOY et INDI-BOY mais pas le BRIDGE-BOY.
• L’impédance des capteurs peut être de 350 Ω pour 2 capteurs. Elle doit passer à 1.000 Ω pour 3 ou 4 capteurs. - Prévoir une électronique de limitation (BRDGE- BOY, CRANE-BOY, etc) par capteur et réaliser la limitation sur la somme à l’aide d’une électronique supplémentaire (BRIDGE-BOY (avec option E-SUM), CRANE-SUMD et DISP-SUMD).
- Dans le cas où il n’y a que 2 capteurs de force (ou axes dynamométriques), le CRANE-BOYDP et DISP-BOYDP sont des électroniques de limitation à 2 entrées assurant la limitation sur chacune d’elle ainsi que sur leur somme.Remarque : Ces entrées sont de type 4..20 mA. Les capteurs doivent donc être équipés d’un amplificateur (option J ou C).
Comment tarer un afficheur DIP-Fx-yz à l’aide d’un contact extérieur ?
[answer] =>Réponse:
Il est possible de tarer un afficheur DISP-Fx-yz à l’aide d’un contact extérieur libre de potentiel.
Pour ce faire il faut :
- S’assurer que le dip-switch « Calib’n lock » soit en position « lock » (on),
- Faire un contact temporaire entre les bornes 7 (Common) et 8 (CC.1).
Quelle est la précision d’un système de limitation de charge dont le capteur est un axe dynamométrique?
[answer] =>Réponse:
La précision de mesure d’un système de limitation de charge dépend de différents facteurs:
- La précision de l’axe dynamométrique
Un axe dynamométrique présente essentiellement des erreurs mécaniques (non-linéarité, hystérésis et non répétabilité). Elles dépendent des dimensions de l’axe (rapport longueur / diamètre qui ne peut être trop petit) ainsi que de la qualité des appuis.Pour les axes standards (série 5300), cette erreur représente ± 0,5 % de leur pleine échelle.Si nécessaire, cette erreur peut être ramenée à ± 0,2 % moyennant un profilage de l’axe (faisabilité à vérifier).
En revanche, si le rapport longueur/diamètre est trop petit cette erreur peut monter à 5 %.Les dérives thermiques de zéro et de sensibilité étant inférieures à 0,2 % de la pleine échelle/10°C, elles sont souvent négligeables par rapport aux erreurs mécanique. - La précision de l’électronique de limitation:
La précision d’une électronique de limitation de type Crane-Boy est de l’ordre de ±0,1%.L’erreur induite par cette électronique est donc généralement négligeable en comparaison aux autres erreurs. - Le poids du câble de levage:
Plus la charge est en hauteur, plus le câble est enroulé sur le tambour et donc moins supporté par l’axe dynamométrique.
Cela peut provoquer une erreur de plusieurs % entre la position basse et la position haute de la charge.
Pour éliminer cette erreur il faudra donc toujours faire la mesure à la même hauteur ou prévoir un système de correction tenant compte de la hauteur de levée. - Les frottements dans les poulies de levage:
Les poulies de levage présentent une résistance à la rotation. La conséquence de ces frottements est:- En montée: de diminuer la charge appliquée à l’axe dynamométrique
- En descente: de l’augmenter.Pour atténuer cette erreur, il conviendra d’effectuer l’étalonnage et les mesures de charge toujours après un même mouvement (à priori une montée).
- Les phénomènes dynamiques
Toute accélération ou décélération de la charge perturbera dans un sens ou l’autre la mesure de son poids.
Il est possible d’atténuer l’influence de ces perturbations par un filtrage adéquat au niveau de l’électronique de limitation mais cela est limité car le temps de réponse de la limitation de charge ne peut être trop long.
En conclusion:
Compte tenu d’un axe dynamométrique aux dimensions favorables et en faisant l’étalonnage et la mesure de charge toujours à la même hauteur, après une montée en petite vitesse, la précision de la mesure sera comprise entre ± 1 et 2 % de la charge maximale d’utilisation (CMU) de l’engin de levage.
Comment configurer la sortie RS232 de l'indicateur de pesage INDI5250 et de l'indicateur étalon (INDI-00)?
[answer] =>Réponse:
- Accéder au menu SETUP:
Appuyez sur la touche , introduire Fn49 via les touches
, introduire Fn49 via les touches  et
et 
Validez via la touche affichage SETUP
affichage SETUP
Validez via la touche
- Modifier les paramètres de communication:
Appuyez (1x) sur cette touche pour faire apparaître SETUP2, puis appuyez sur
pour faire apparaître SETUP2, puis appuyez sur 
Vérifiez tous les paramètres ci-dessous en appuyant
2.t = 02
2.c = 65
2.l = 01
2.r = 00
2.a = 00
2.f = 00
2.e = 1
2.1 = 0
2.2 = 0
2.3 = 0
2.4 = 0
2.5 = 0
2.6 = 0
2.7 = 0
2.8 = 0
2.d = 17
SETUP2
Appuyez sur la touche pour sortir
pour sortir - Modifier la vitesse de rafraichissement de l’affichage:
Appuyez sur la touche pour afficher « Par »
pour afficher « Par »
Appuyer sur la touche plusieurs fois jusqu’à l’apparition de « 6.P » et mettez « 14 » en utilisant la touche
plusieurs fois jusqu’à l’apparition de « 6.P » et mettez « 14 » en utilisant la touche 
Appuyer sur la touche pour valider
pour valider
Appuyez sur la touche pour sortir.
pour sortir. - Mémoriser les modifications:
Appuyez sur la touche 2x pour accéder à « STORE » et valider par
2x pour accéder à « STORE » et valider par 
- Câble à utiliser:
Le câble RS232 entre la sortie de l’INDI 5250 et par exemple un pc doit être croisé (TX et RX). - Paramètres de communication:
2400 bauds – ATTENTION
7 bits de data + 1 bit de parité
ou
8 bits de data + 0 bit de parité
1 bit de stop
[meta_title] => Comment configurer la sortie RS232 de l'indicateur de pesage INDI5250 et de l'indicateur étalon (INDI-00)? [meta_description] => Tutoriel pour configurer la sortie RS232 de l'indicateur de pesage INDI5250 et de l'indicateur étalon (INDI-00) [meta_keywords] => Indicateur étalon, Indicateur de pesage, Étalonnage indicateur, Pesage [tags] => Indicateur étalon,Indicateur de pesage,Étalonnage indicateur,Pesage [link_rewrite] => configuration-de-la-sortie-rs232-indi-5250-ou-indi-00 [link_rewrite_cat] => electroniques )[7] => Array ( [id_gomakoil_faq] => 31 [id_gomakoil_faq_category] => 1 [link_rewrite_no] => [most] => 0 [association] => 0 [hide_faq] => 0 [name] => Admin [email] => no [by_customer] => 0 [position] => 15 [active] => 1 [date_add] => 2019-07-01 09:47:05 [as_url] => 0 [id_lang] => 1 [id_shop] => 1 [question] =>
Comment définir des seuils de déclenchement différents à partir d'un bouton sur nos limiteurs de charges digitaux?
[answer] =>Réponse
Nos limiteurs possèdent 2 listes de paramètres, la liste principale et la liste auxiliaire, pour passer de l'une à l'autre en appuyant sur F1 par ex, il faut aller dans le menu 2, et attribuer à F1, la fonction List. De cette manière, en appuyant sur F1, il s'affichera Load A et Load B correspondant respectivement à liste principale et liste auxiliaire.
Pour définir différents seuils, il suffit alors de spécifier SP1 lorsque l'on se trouve dans le mode "LOAD A" de faire de même après être passé dans le mode Load B.
[meta_title] => [meta_description] => [meta_keywords] => Limiteurs de charge, Seuil déclenchement, Limitation de charge, Étalonnage [tags] => Limiteurs de charge,Seuil déclenchement,Limitation de charge,Étalonnage [link_rewrite] => definir-des-seuils-de-declenchement-differents [link_rewrite_cat] => electroniques )[8] => Array ( [id_gomakoil_faq] => 32 [id_gomakoil_faq_category] => 1 [link_rewrite_no] => [most] => 0 [association] => 0 [hide_faq] => 0 [name] => Admin [email] => no [by_customer] => 0 [position] => 16 [active] => 1 [date_add] => 2019-07-01 10:28:49 [as_url] => 0 [id_lang] => 1 [id_shop] => 1 [question] =>Comment configurer les produits de la famille PAX pour récupérer la valeur affichée sur mon PC ou mon automate?
[answer] =>Réponse:
Configuration du Pax
- Configuration RS232
- PAr pour entrer dans le menu
- aller dans le menu 7 Srl avec F1
- bAUd = 9600
- dAtA = 8
- Addr = 0
- Abru = yes
- OPT = yes
- 6roSS = No
- tArE = no
- IMP = yes
- tot = no
- HILO = no
- Press PAR (sortir)
- Configuration fonction:
- Press PAR
- aller dans le menu 2 FNC
- Usr-1 = Print
- sortir
- Configuration Hardware:
Connecter le terminal 7 (COM) au terminal 8 (USR1).
Le Pax envoi sur la liaison RS232, la valeur lue.
Comment appliquer une résistance de calibration (Rcal) sur un capteur déjà livré ?
[answer] =>Réponse:
Remarques préalables :
- Cette procédure ne concerne que les capteurs en pont de Wheatstone et sans amplificateur interne. Le signal de sortie (Vout) et donc du type mV/V.
- Elle nécessite l’usage d’un millivoltmètre dont la précision est suffisante : (ex. :± 0,01 mV)
- Faire attention à la polarité des signaux mesurés
La valeur recommandée de Rcal dépend de la résistance du capteur et du signal que l’on veut générer.
Exemples:
- Pour un capteur dont la résistance est de 351 Ω, une Rcal de 50 kΩ engendrera un déséquilibre de ± 1,75 mV/V
- Pour un capteur dont la résistance est de 702 Ω, une Rcal de 120 kΩ engendrera un déséquilibre de ± 1,46 mV/V
Comment procéder:
- Mettre le capteur sous tension (ex : 10 VDC)
- Attendre quelques minutes
- Mesurer la tension d’alimentation (Vexc)
- Mesurer le signal de sortie du capteur à vide (Vo).Si le capteur n’est pas en charge, ce signal est inférieur à 1 % du signal maximum.
Ex. : -0.2mV < Vo <+0,2 mV (Vexc = 10 V, Vout = 2 mV/V) - Brancher la résistance de calibration entre les bornes Alimentation ‘’+’’ et Signal ‘’+’’Rem. Ce branchement peut aussi se faire entre les bornes Alimentation ‘’-’’ et Signal ‘’-’’ mais les résultats seront légèrement différents.
- Mesurer le signal de sortie (Vr)
- Calculer la variation du signal de sortie : Vcal (mV/V) = (Vr-Vo) / Vexc
- La grandeur mécanique (force ou couple) simulée est égale à : Etendue de Mesure (EM) * (Vcal/Vout)Cette valeur simulée n’est valable que pour le capteur, la Rcal et les bornes utilisées. Il est donc recommandé d’associer physiquement ces composants et de consigner les bornes utilisées ainsi que les valeurs calculées.
Exemple:
Soit un capteur de force
- Etendue de mesure (EM) : 100 kN
- Sensibilité annoncée sur le certificat de contrôle (Vout) : 2,000 mV/V
- Résistance annoncée sur le certificat de contrôle : 702 Ω
Soit une résistance de calibration (Rcal) : 120 kΩ
Mesures:
- Tension d’alimentation capteur (Vexc) : 10,2 V
- Signal capteur à vide (Vo) : + 0,02 mV
- Signal capteur avec Rcal branchée : + 14,62 mV
Résultats:
- Variation de signal de sortie Vcal= (Vr-Vo) / Vexc : (14,62-0,02) / 10,2 = 1,431 mV/V
- Force simulée Fcal = EM*(Vcal/Vout) : 100*(1,431 / 2,000) = 71,55 kN
Remarque: La précision de cette méthode dépend aussi de la précision avec laquelle est connue la sensibilité nominale du capteur (Vo) et donc par ailleurs aussi de l’erreur de répétabilité de celui-ci.
[meta_title] => [meta_description] => [meta_keywords] => Calibration, Pont de Wheatstone, Jauge, Résistance [tags] => Calibration,Pont de Wheatstone,Jauge,Résistance [link_rewrite] => comment-appliquer-une-resistance-de-calibration-sur-un-capteur-deja-livre [link_rewrite_cat] => electroniques )[10] => Array ( [id_gomakoil_faq] => 34 [id_gomakoil_faq_category] => 1 [link_rewrite_no] => [most] => 0 [association] => 0 [hide_faq] => 0 [name] => Admin [email] => no [by_customer] => 0 [position] => 18 [active] => 1 [date_add] => 2019-07-02 06:16:56 [as_url] => 0 [id_lang] => 1 [id_shop] => 1 [question] =>Quelle est la vitesse de rafraîchissement de nos cartes de communication pour les produits de la famille "PAX"?
[answer] =>Réponse:
- Transmission RS232:
2 à 50 ms - Transmission RS485:
50 à 100 ms - Lecture du PAX:
1, 2, 5,10 mesures / secondes (Menu 4 – paramètre : dSP-t) - Sortie Analogique:
Un réglage du paramètre udt à 0 (menu 8 – paramètre : udt) entraîne une fréquence de rafraîchissement de 20 fois par seconde.
[meta_title] => [meta_description] => [meta_keywords] => Indicateur, Display force, Afficheur, PAX [tags] => Indicateur,Display force,Afficheur ,PAX [link_rewrite] => quel-est-la-vitesse-de-rafraichissement-des-cartes-de-communication-pour-les-pax [link_rewrite_cat] => electroniques )) 1